Pedestrian
Detection R-CNN.
Leveraging Faster R-CNN architectures to identify and track pedestrians in real-time. A deep dive into two-stage object detection for autonomous safety and urban surveillance.

Framework
PyTorch / Torchvision
Architecture
Faster R-CNN
Base Model
ResNet-50 FPN
Libraries
OpenCV, NumPy
The Vision
In the realm of autonomous systems, the ability to perceive human presence with high confidence is non-negotiable. This project explores the Faster R-CNN (Regional Convolutional Neural Network)workflow to solve the pedestrian detection problem.
Unlike single-stage detectors (like YOLO), Faster R-CNN utilizes a Region Proposal Network (RPN)to separate the detection task into two distinct phases, resulting in superior localized accuracy especially in crowded urban environments.
Model Output Visualization
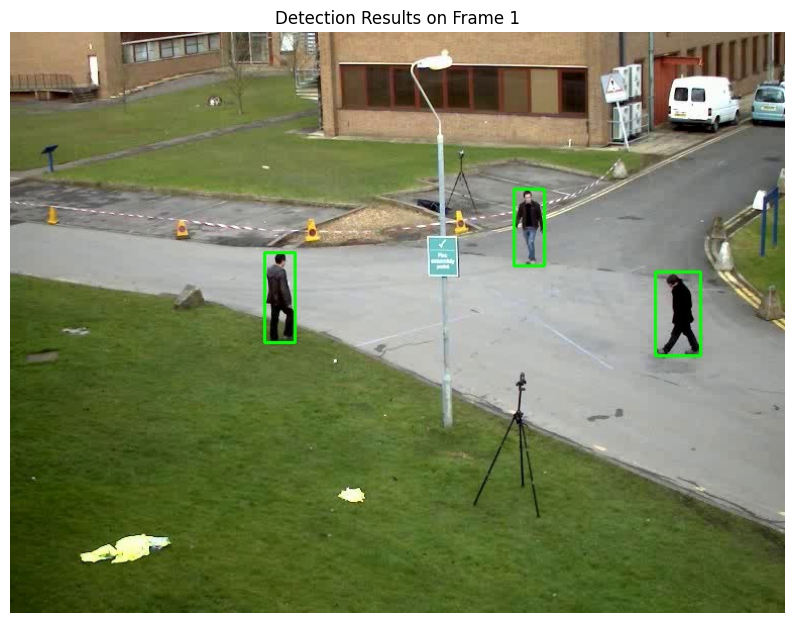

Multi-Target Tracking

Occlusion Handling
Detection Pipeline
Region Proposal (RPN)
The model proposes potential bounding boxes where pedestrians might exist using a sliding window approach over feature maps.
Feature Extraction
Utilized a Backbone CNN (like ResNet-50) to extract deep spatial features from the input frames.
Classification & Refinement
Final stage determines if the proposal is a 'pedestrian' and fine-tunes the bounding box coordinates for pixel-perfect accuracy.
Real-World Applications
Autonomous Safety
Critical for Emergency Braking Systems (AEB) in self-driving cars.
Smart Surveillance
Automated monitoring for restricted zones and public safety analytics.